微型机器人是科技领域高精尖技术高度融合的产物,往往这些微型机器人需要达到昆虫级大小的水平,在这种情况下,现有的机械技术很难支撑这样的机器人运行。
在微型机器人领域,大量的采用仿生学的原理,通过研究动植物的原理,来弥补人类创造机器人的不足。虽然人类已经可以创造出类似于蚊虫大小的机器人,但是这类机器人的降落一直是个大问题。

即便是现在的无人机,在降落时,要求也比较苛刻,至少需要地面平稳。可是我们制造的昆虫类机器人,需要像昆虫一样,降落在任何地方,哪怕一片树叶上。
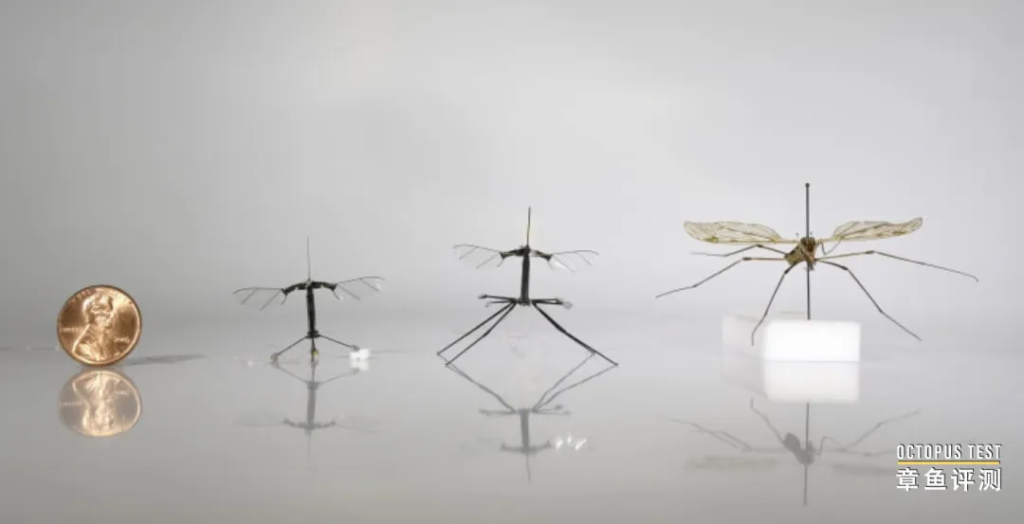
RoboBee 是哈佛大学微型机器人实验室的昆虫机器人项目。RoboBee 能够不受束缚飞行,利用仿生学技术,模仿大蚊的运动特征。

RoboBee 的着陆一直存在问题,部分原因在于它体积小、重量轻——重量仅为十分之一克,翼展仅 3 厘米。之前的版本受到严重的地面效应影响,即由于拍打翅膀时产生的空气涡流而导致的不稳定——很像直升机螺旋桨产生的地面强风。
这让RoboBee飞行器的着陆变得异常复杂。实验室从自然界汲取灵感,希望对机械装置进行升级改造,使其能够在各种地形上实现娴熟的飞行和优雅的着陆。

他们参考了大蚊的结构,大蚊长长的、有关节的附肢很可能赋予了它们减缓着陆速度的能力。大蚊的另一个特点是飞行时间短——它们短暂的成虫寿命(几天到几周)大部分时间都花在着陆和起飞上。
这在很多层面与RoboBee昆虫飞行器类似,经过研究,最终选择了大蚊类似的方案,解决了降落的难题。
这款RoboBee 体型娇小,飞行能力如同昆虫,这为未来的应用提供了无限可能,包括环境监测和灾害监测。目前RoboBee还只能通过电线连接为其飞行供电,但作为实验室产品这已经足够。
未来版本将会采用独立供电模式,据悉,RoboBee已经在开发太阳能版本。
本文仅代表个人观点,只做交流分享之用。部分资料来源与网络,如有侵权请随时联系处理。发布者:章鱼评测,未经作者本人授权,禁止任何形式转载本网站内容。微信:15711082980:https://500miao.com/?p=2440





{kind=link}
{kind=link}